How to fail-safe Safety Integrity Level (SIL) motor control technology

The process industry needs Safety Integrity Levels (SIL) for a wider range of control and protection devices, including Safe Failure Break (SFF), Mean time between failures (MTBF) certification, and Diagnostic Coverage to ensure safety in hazardous areas.
Generally, a motor is used to drive a dynamic system. Therefore, effective diagnosis of motor failure is essential, as failure can result in severe system damage. Therefore, Fail- Safe control technology is required in order to minimise damage to the system in the event of a motor failure.
Rotor position, DC correlation voltage, DC correlation current and phase current data can be obtained during motor operation. The position of the rotor is measured with an encoder and a Hall signal. If an encoder fails, the hall signal is also used to estimate the position of the rotor so that the motor can function properly. The DC terminal is supplied with voltage in order to operate the motor. The heat loss and cooling modes of a permanent magnet synchronous motor (PMSM) directly affect the temperature rise. The accurate evaluation and prediction of stator winding temperature is of great significance to the safety and reliability of PMSMs.
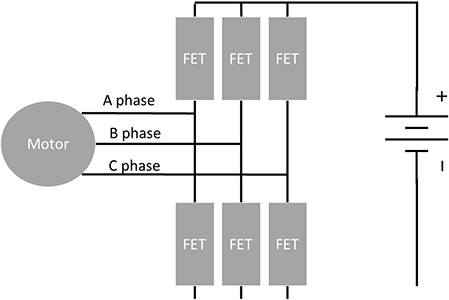
Figure 1: Fail-safe motor control solution
The measured DC link voltage must be consistent with the default voltage. If there is a difference between them, the system considers a failure. Therefore, when a fault occurs, the motor is operated in limited mode to ensure the safety of the hardware.
The measured DC link current corresponds to the sum of the measured phase currents. The measured phase current is converted into DC link current by means of coordinate transformation. The error is detected by comparing the measured current with the DC link current. If the phase ‘A’ current sensor fails, the phase ‘B’ current signal is used to estimate the phase ‘A’ current. The figure 1 shows the Fail-Safe motor control solution

Figure 2: DC link of the motor
The below points ensures SIL for fail-safe motor control
- Encoder fault: When a sensor malfunction occurs, fault tolerance checking is used to maintain proper system performance in the event of this failure. At low speed, the fault is detected using Hall signal counting and encoding, and at normal speed, a sliding mode monitor is used. If the encoder sensor fails, the Hall sensor can be used to estimate the position of the rotor, the effectiveness of this method at different speeds has been confirmed to work well and helps to stabilise the system.
- DC link voltage fault: An error occurring in the system is detected when the DC link voltage is out of range. However, analysing the cause of the failure is difficult with only the voltage generated. Therefore, the system works with a limited reference voltage to ensure that the performance and the voltage is constant in the field-oriented control. When the DC link voltage is in the normal range, the system considers the mode as error recovery, and the voltage reference is no longer limited.
- DC link current fault: If the difference between the field-oriented control reading and the calculated value exceeds 10%, the system considers it an error. If the phase current is normal, there is a problem with the DC link current sensor. In order to make the system stable in case of a fault in current sensor in the DC link, the DC link current converted from the phase current is used.
- Phase current fault: When using a brushless three-phase motor (BLAC), the phase current according to equation (1) has a phase difference of 120 °. If the phase ‘A’ current sensor is defective, ‘Ia’ is evaluated with the phase B current. The three phases of the current used to start the motor are in parallel. Depending upon the speed and load, the frequency and the level of the RMS are different. However, at one particular location, the frequency and RMS values will be the same as expressed in Equation 2. If one of the current sensors is defective, the value of the other phase sensors can therefore be used to estimate the phase current. The nominal phase current is used to control the fault tolerance.
There are several kits available for motor control, one of which is MPC5744P development kit for 3-phase PMSM. This motor control development kit is ideal for applications requiring one PMSM motor, such as power steering or electric powertrain. Designed to enable rapid prototyping and evaluation of the motor control application early in the design process.
ปัญญาประดิษฐ์
หนึ่งในการปฏิวัติที่ยิ่งใหญ่ที่สุดในประวัติศาสตร์ของมวลมนุษยชาติ! AI เป็นแนวคิดการรวมสิ่งต่าง ๆ เข้าไว้ด้วยกัน โดยนำความฉลาดของมนุษย์ใส่ลงไปในเครื่องจักร
DEVKIT HQ
The #1 Destination for Embedded Evaluation Boards, Development Kits, and Tools
ทรัพยากรทางเทคนิค
เราขยายห้องสมุดของเราอยู่ตลอดเวลา ห้องสมุดที่รวบรวมทั้งเอกสารระเบียบมาตรฐาน บทความทางเทคนิค วิดีโอ โมดูลการฝึกอบรม บทช่วยสอน และอีกมากมายเพื่อช่วยเหลือคุณในการพัฒนางานออกแบบ ธุรกิจ และหน้าที่การงานของคุณ
เทคโนโลยี
การใช้งาน








ทรัพยากรอื่น ๆ เพิ่มเติม
เครื่องคิดเลขและชาร์ทการแปลงหน่วย
คู่มือเลือกซื้อและแค็ตตาล็อก
โมดูลการเรียนรู้ขั้นพื้นฐาน
จุดเด่นด้านเทคโนโลยี
ทรัพยากรการออกแบบ
อภิธานศัพท์ทางวิศวกรรม
ฝ่ายสนับสนุนด้านเทคนิค
Parts Finder Tools
